
详情
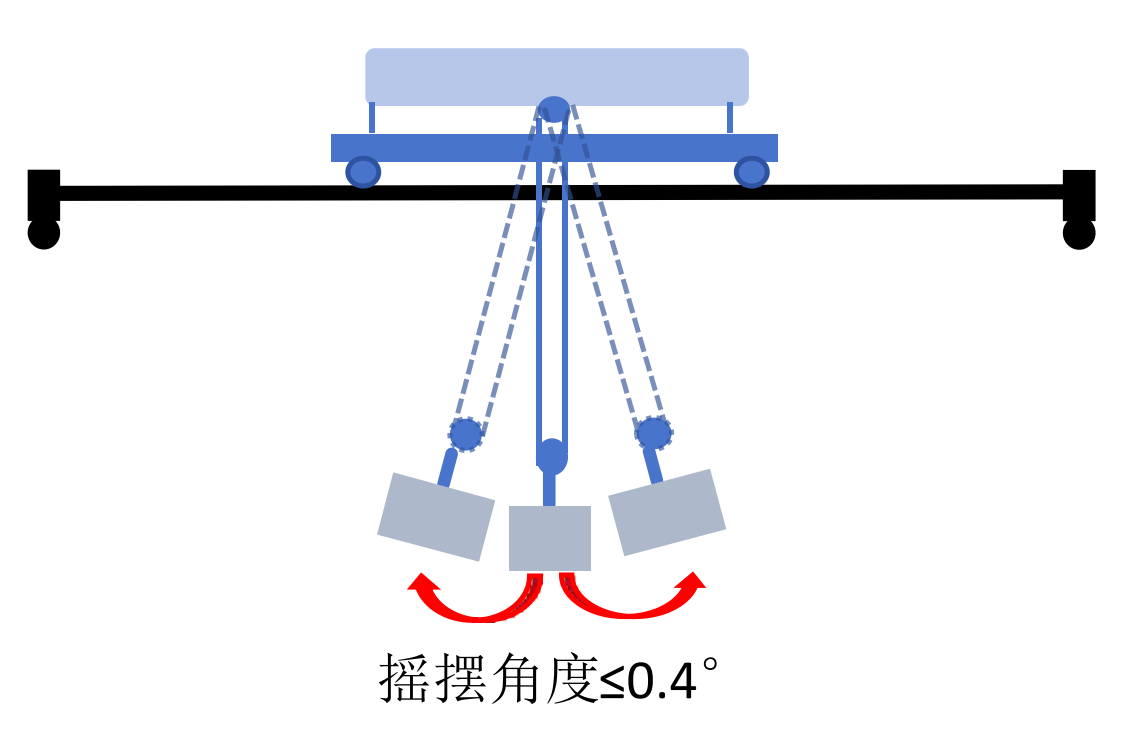
天车在变速运动中吊具的速度变化会滞后于大车与小车的速度变化,从而不可避免的会发生吊具晃动的情况,且由于物体惯性的存在、操作人员的操作不熟练等会加剧吊具的摇摆晃动,对设备以及附件相关的人员都会造成危害。为了消除这种速度变化滞后带来的角度摇摆,千盟研发了防摇控制器。

设备型号:QM-AS-100
输入电源:24VDC/500mA
工作温度:-30℃ ~ +85℃
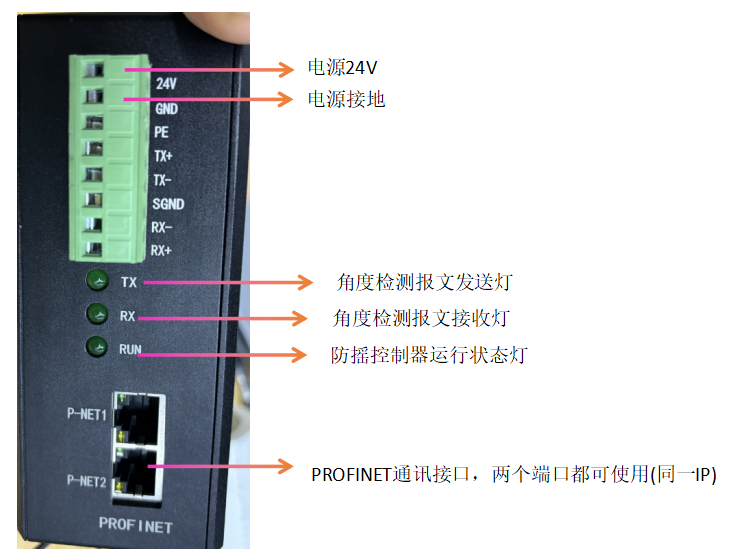
通讯接口:PROFINET、RS485、TCP/IP网口
驱动单元:大小车的驱动都是变频器控制
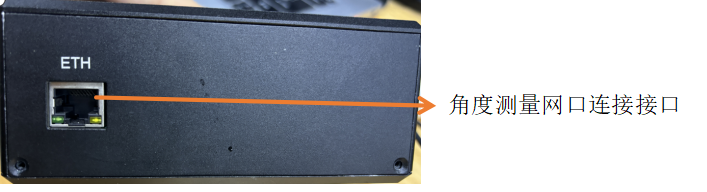
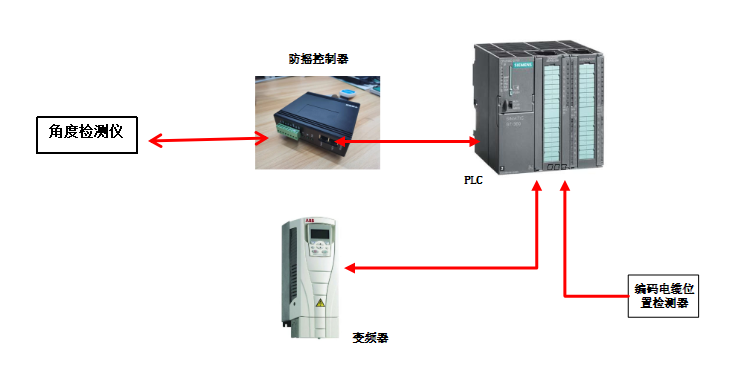
2.1硬件连接示意图
2.2 千盟防摇技术参数
l QM防摇控制器的防摇定位精度能达到<20mm;
l QM防摇控制器的防摇角度<0.4°;
l QM防摇控制器实现大车小车两轴联动。
2.2 QM防摇系统优势
l 延长大车车轮与轨道的使用寿命、节约运行成本。
l 消除桥式起重机的摇摆现象,实现起重物的安全运输。
l 对静态的避障区域按设定的规则避让,执行必要的速度限制。
l 对一些必要的数据做合理性判断,提供报错信息。
l 支持天车运行期间作业暂停、目标位置切换。
l 针对危险区域,提供非静止通过模式,能在考虑摇摆角度的情况下,最大程度地缩短天车从初始位置运行到目标位置的时间,提高整个作业过程的效率。
避障通过点非静止通过与静止通过的效率对比示意图:
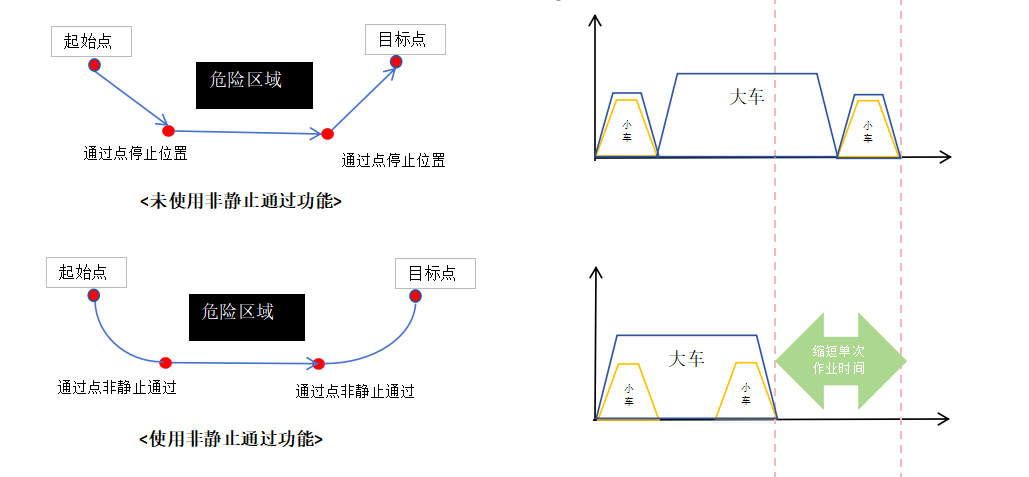
如上图所示,在无人天车移动区间内避开危险区域时,使用非静止通过功能,天车收到指令,经过避障通过点位置时,天车运行速度非0,继续向目标位置运行。当未使用非静止通过功能时,天车在起始点之后的每个通过点位置都速度降为0,再进行启动向下一通过点运行,直到到达目标点,这样会产生频繁且冗余的加速/减速时间,降低单次作业效率,从而降低总体作业效率。
l QM防摇控制支持开环、闭环、手动防摇控制模式,可实现多轴联轴的防摇控制:
1. 开环防摇控制模式
根据自动模式的相关参数的设置,防摇控制器计算出最优防摇速度曲线,实时输出防摇速度给变频传动系统,来控制大车、小车执行机构的速度来消除吊物的摇摆,不带角度测量模块。
2. 闭环防摇控制模式
QM防摇控制器与角度测量模块组成一个闭环防摇控制系统,角度测量模块由有红外光源的防水相机和安装在负载上的反光板组成,测量天车大车、小车两轴方向的摇摆角度。对摆角与位置实现双闭环控制。
3. 手动模式
QM防摇控制器通过手动模式的各个档位对应的速度,根据防摇算法计算出防摇速度曲线,实时将防摇速度传递给变频器,控制大车/小车的平稳运行。

版权所有 Copyright © 2019 湖南千盟工业智能系统股份有限公司 京ICP证000000号营业执照查询
湘公网安备 43060402000021号














