智能巡检机器人在变电厂、石化厂等工业场景获得基本的普及,代替巡检人员完成巡检工作,可以节省人力,提高安全系数。目前,在煤化工中使用巡检机器人的案例较少,且变电厂、石化厂的环境较为简单,此设计的巡检机器人无法应对煤化工厂中的复杂环境。焦炉采用煤气加热,加热活到众多,煤气管道非常庞大。为实现安全生产管理,需地下室巡检人员定时对焦炉地下室进行巡检,但焦炉地下室相对封闭,存在高温、煤气残留等因素,安全风险较高。
咨询
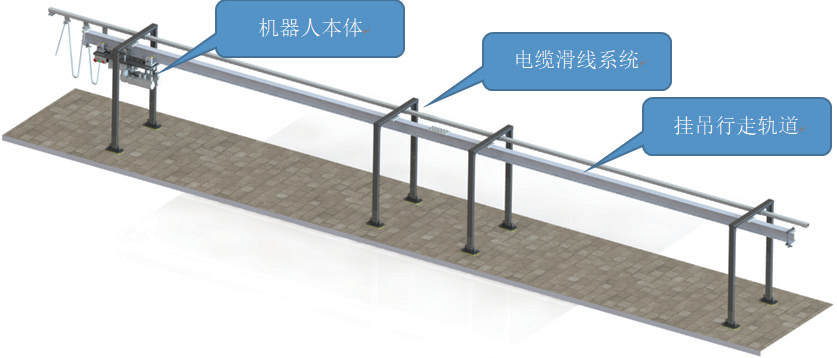
机器人自动定位
根据上位机程序巡检机器人实现自动启 动、自动走行、自动停止。依据上位机的指定巡检站点位置,自动以最快速度行驶至目标位置。
机器视觉识别
通过视觉系统,及交换信号对对检测目标进行识别与进行判断。判断异常将由上位机报警,提示操作人员进行处理。
有害毒气浓度检测
巡检机器人在走行过程中,通过检测设备对一定区域内的有毒气体(CO)浓度进行检测,并通过上位机报警,提示操作人员进行处理。
系统设置、故障诊断、系统日志管理。
提供系统正常运行所需要的所有相关参数的设置和查询功能,对部分数据或者参数进行人工修改,计算机记录修改状态。
定期定点自动巡检
设定每圈巡检开始信号,系统自动计算巡检开始时刻,设定在巡检目标位置停止等待时长t1(s),设定巡检站点路径(站点编号、站点总数n、总 长L)。设定巡检一圈总时长T。
检测界面实时显示
实时动态显示机器人启停标识、行走过程模拟、当前位置标识。
数据管理
数据的保存、查询、统计,以及显示数据报表,为决策者提供数据信息支持。
自动避障等功能
巡检机器人自身雷达障碍物检测,当检测到障碍物时自动停止
版权所有 Copyright © 2019 湖南千盟工业智能系统股份有限公司 京ICP证000000号营业执照查询
湘公网安备 43060402000021号